Graph-based Path Planning
1.2.Grassfire Algorithm
- 将终点标记为0
- 将终点周围所有离终点1步之遥的点标记为1
- 将所有离终点2步之遥的点标记为2
- 如此递增,直至起点被标记
- 从起点依次寻找标记递减的点到终点,遇到相同标记的点可以任选其一
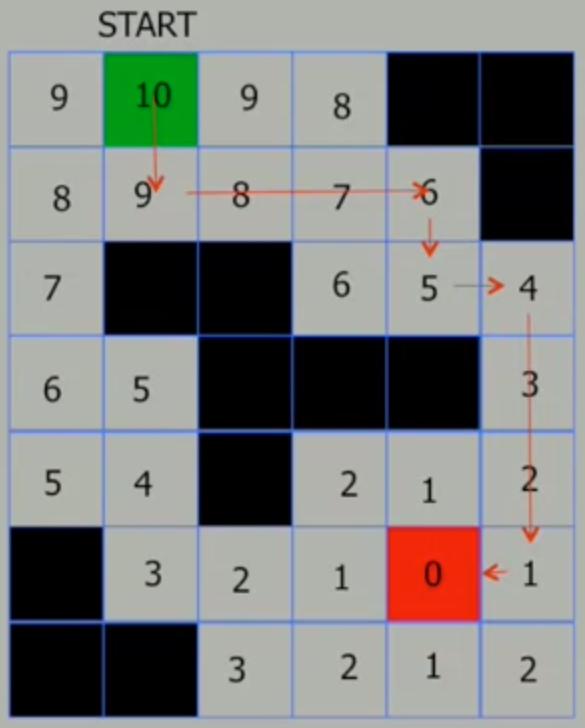
网格中的数字代表“这个点抵达目的地节点的最小步数“,这些数字由目的地节点向外辐射的模式,就像火势蔓延一样,所以叫Grassfire。
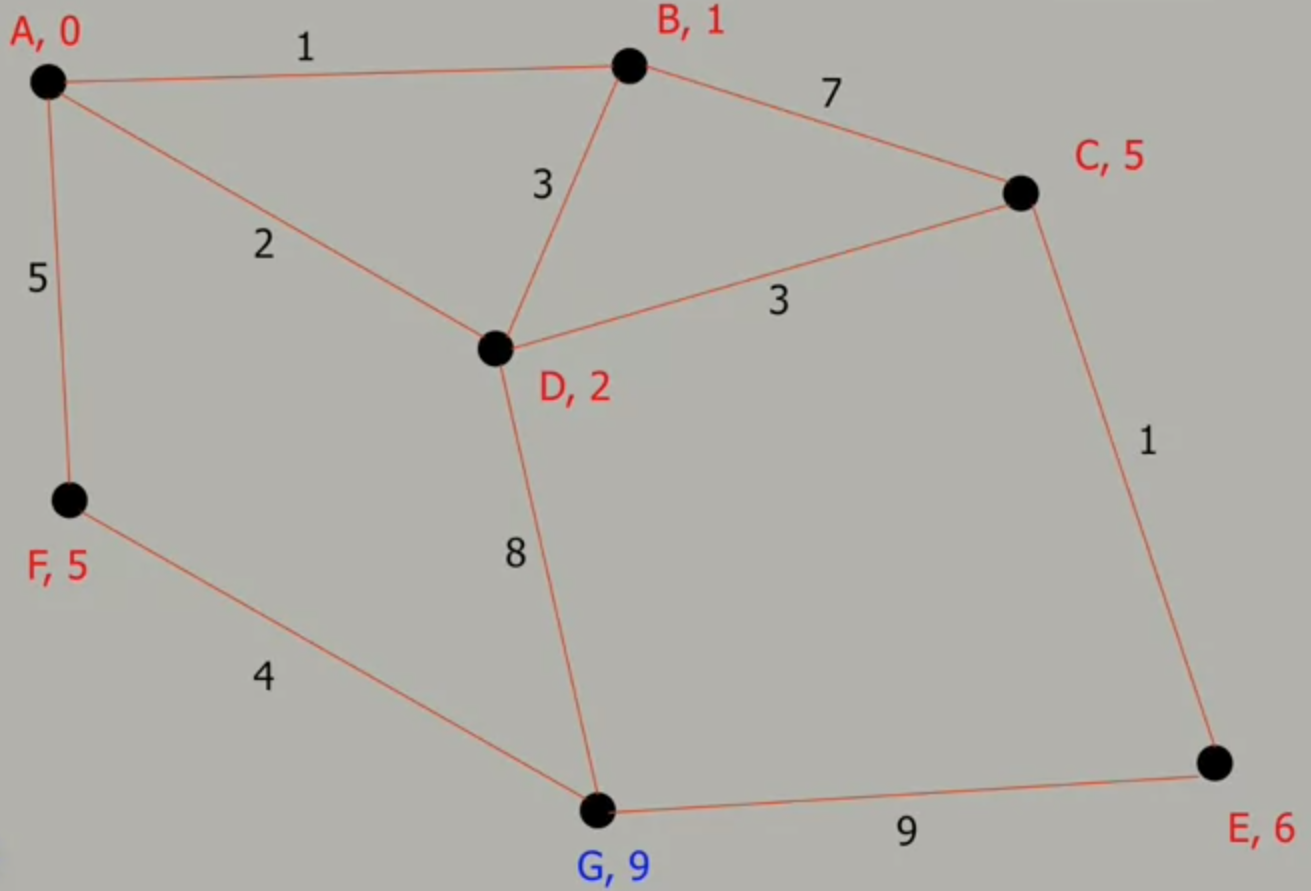
1.3.Dijkstra’s Algorithm
Dijkstra就是Grassfire在有权图上的扩展!好妙啊!
- 将起点标记为0
- 更新与当前节点相连的点到起点的最近距离
- 如此递增,直至所有点都被访问
和wxc讨论“一个新算法”,如果不将结束条件设置为“所有点都被访问”,而是“访问过的所有端点到起点的距离都大于终点到起点的距离”,可提前终止,减少搜索空间。不知道是不是有这么一种算法,叫什么名字。
1.4: A* Algorithm
代价函数=实际代价+估计代价(启发函数)
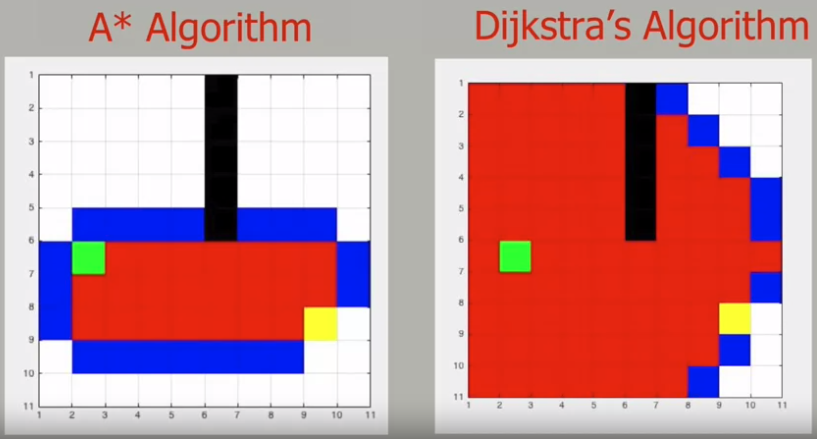
Dijkstra和A*详见之前的博文:路径规划常用算法
练习
If you use the Grassfire or breadth first search procedure to plan a path through a grid from a node A to a node B, then you use the same procedure to plan a path from node B to node A, are the two paths guaranteed to be the same except in opposite directions?
Answer: No.
暂时没有想到例子,我认为都是有多条最短路径,就算运行2次都是从A到B,结果也会不同,而不是因为从B到A造成结果不同。我觉得这题的表述不对,出的不好。
2.1.Introduction to Configuration Space
配置空间(configuration space)是指描述机器人的自由度和可行动姿态的抽象空间。它是一个多维空间,其中每个维度表示机器人的一个自由度,例如关节角度或笛卡尔坐标。配置空间中的每个点都代表着机器人可能的姿态或配置。
机器人的配置空间是指由其全部可达到的配置(位置)所组成的一个集合。某机器人无法到达的特定$t_x$和$t_y$配置,被称为是配置空间障碍。
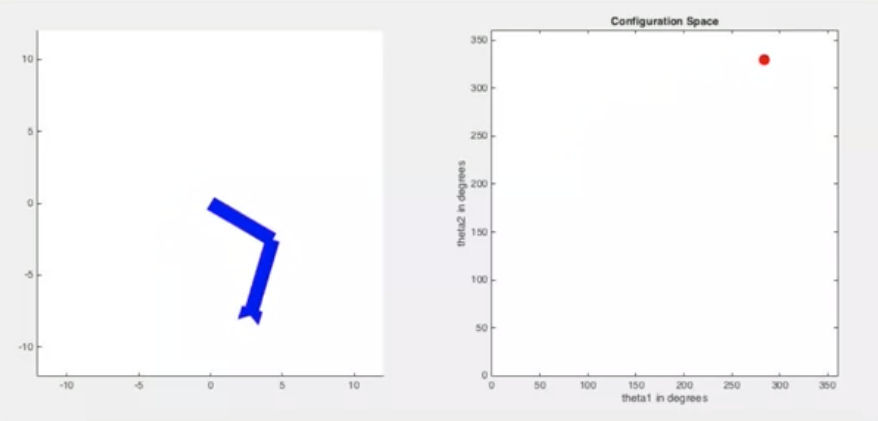
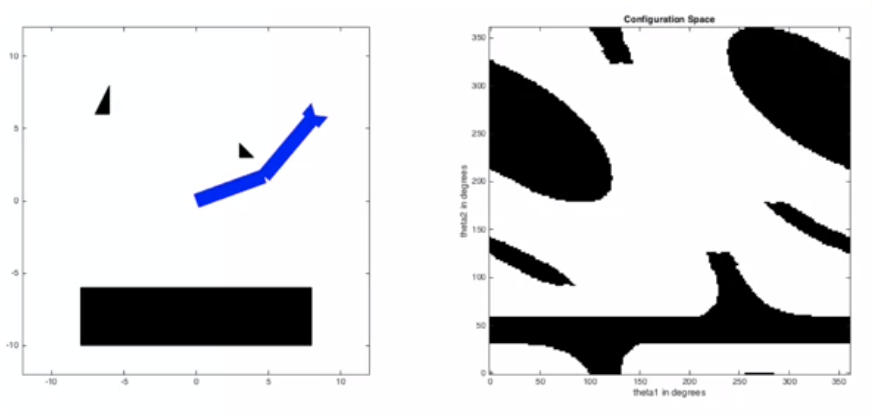
2.2.RR arm
下图是一个拥有两个转动关节的简易二维机械臂,它的配置可以用转动角$\theta_1$和$\theta_2$组成的元组表示,两个角的活动范围均为0~360度,则右图是它的配置空间。
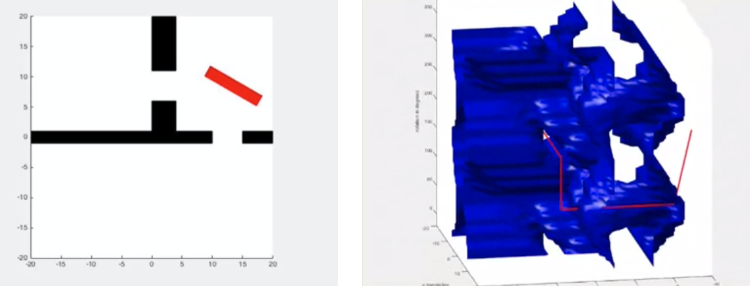
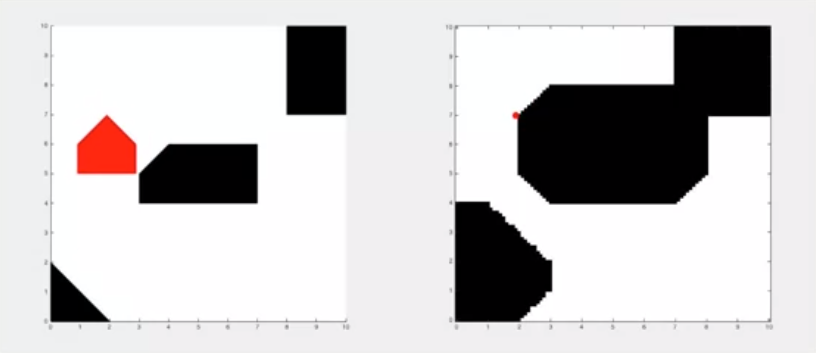
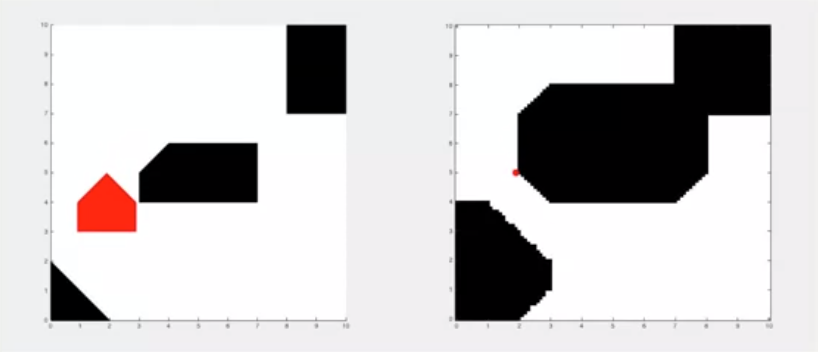
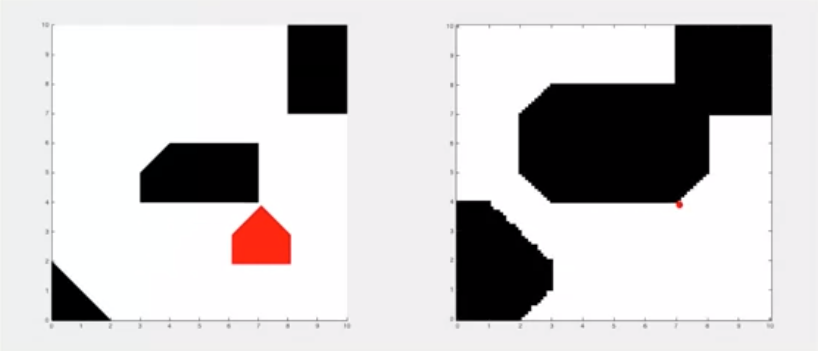
2.3.Piano Mover’s Problem
下面是一个可以在x、y方向平移,且可以旋转的机器人,其配置可以用${t_x,t_y,\theta}$表示,其配置空间是3维的。