- 《计算几何:算法与应用》pdf
- 本书网站 geobook 提供了本书各版本的勘误、所有插图、所有算法的伪代码,以及其它资源。
1.计算几何:导言
为了说明在几何算法的建立过程中所出现的问题,本节将讨论平面凸包的计算。
1.1.凸包的例子
凸包:凸包中的任意两点的连线段在凸包内部。
在计算机科学和数学中,退化情况(Degenerate Case)指的是问题或情况变得异常简单或特殊,以至于常规的算法或方法无法适用或失去有效性。在这种情况下,问题的某些参数或条件会导致解决方案变得不明确、不唯一或无法得到正确的结果。
计算凸包的朴素算法:
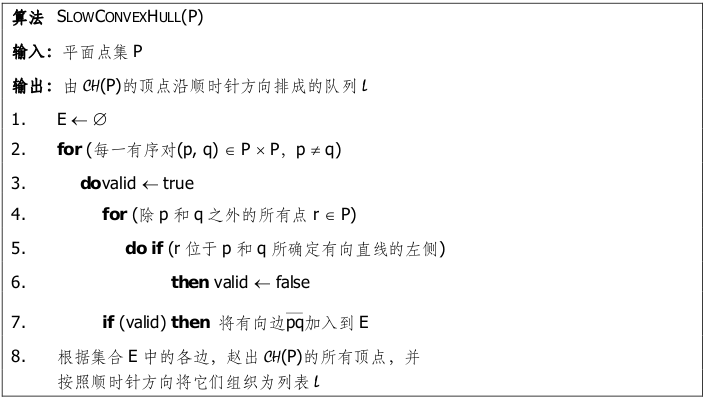
- 退化情况:相对于由p和q所确定的直线,一个点r的位置并不是非左即右,有可能正好落在这条直线上。
- 舍入误差:由于计算过程中是浮点运算,必然存在舍入误差,影响测试精度。
- 时间复杂度为 $\mathcal{O}(n^3)$。
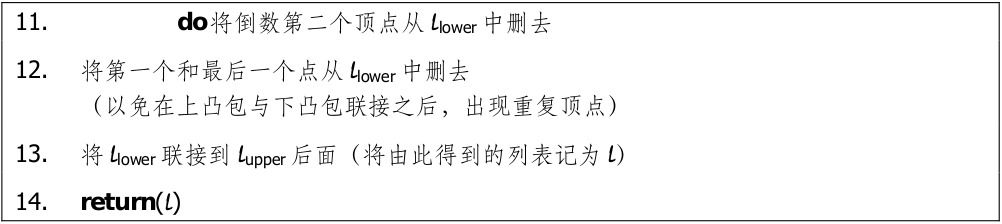
计算凸包的递增式策略:
按x坐标从左至右遍历顶点,计算出构成上凸包(upper hull)的那些顶点,再自右向左扫描,计算出下凸包(lower hull)。
若按照顺时针方向沿着多边形的边界行进,则在每个顶点处都要改变方向。若是凸多边形,则必然每次都是向右转。令$l_{upper}$为从左向右存放上凸包各顶点的一个列表,将$p_i$接在$l_{upper}$最后,再检查$l_{upper}$中最末尾的三个点,看它们是否构成一个右拐(right-turn),若不是,就必须将中间的(即倒数第二个)顶点从上凸包中剔除出去。
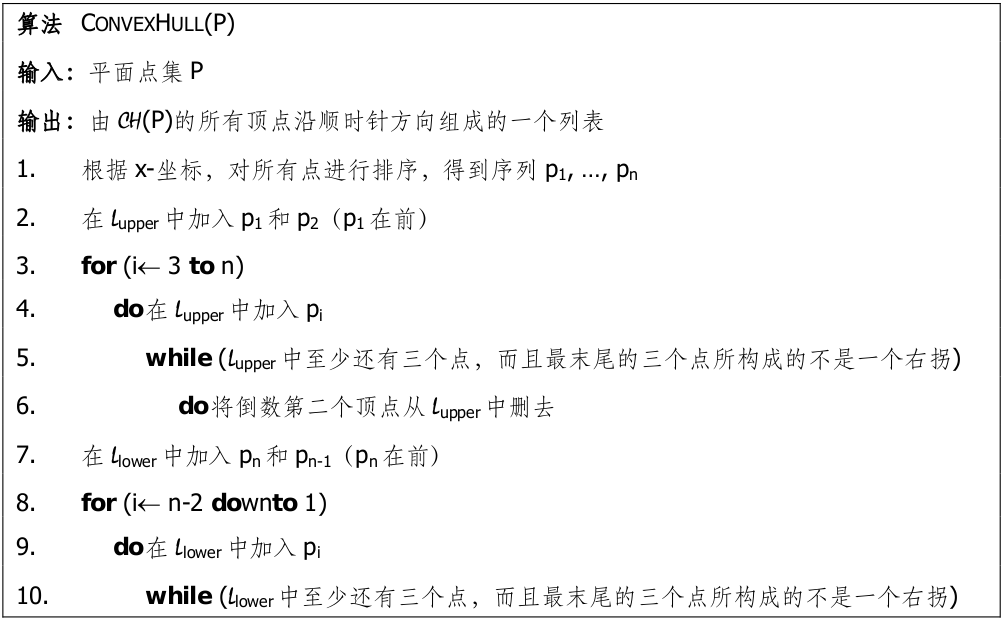
- 当点x坐标相同时,按照y坐标对它们排序。
- 退化情况:将共线的点看成是构成一个左拐。
- 时间复杂度为 $\mathcal{O}(n\log n)$。
2.线段求交:专题图叠合
为了增加地图的可读性,地理信息系统将(不同类型的)信息划分为若干层(layer),每一层都是一幅专题图(thematic map)。这样,某一层可能负责存储有关公路的信息,第二层存放的可能是所有城市的信息,而另一层则存放河流的信息,诸如此类。
2.1.线段求交
我们首先讨论地图叠合问题的最简单形式。相互叠合的两个地图层,分别都是由一组线段表示的某个网络,如道路、铁路、河流。
依次检查每一对线段是否相交需要$\mathcal{O}(n^2)$时间。
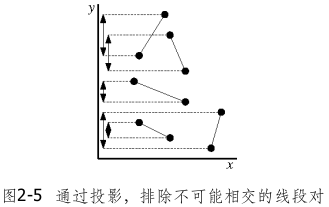
为避免对所有的线段对进行测试,考虑只有那些相互靠近的线段,才可能相交,相距甚远的线段不可能相交。
首先可以通过投影,排除不可能相交的线段对。相当于用一条假想直线 $l$ 自上而下扫过整个平面,跟踪记录所有与之相交的线段,以找出所需的所有线段对。这类算法被称为平面扫描算法(plane sweep algorithm),其中使用到的直线 $l$ 被称为扫描线(sweep line)。与当前扫描线相交的所有线段构成的集合,被称为扫描线的状态(status)。只有在某些特定的位置,才需要对扫描线的状态进行更新,我们称这些位置为平面扫描算法的事件点(event point)。就本算法而言,这里的事件点就是各线段的端点。只有在扫描线触及某个事件点的时候,算法才会进行实质的处理⎯⎯更新扫描线的状态,并进行一些相交测试。
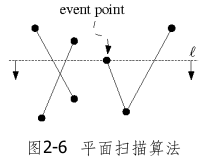
与同一扫描线相交的两条线段,在水平方向上仍然有可能相距很远。我们可以沿着扫描线,将与之相交的所有线段自左向右排序。只有当其中的某两条线段沿水平方向相邻时,才需要对其进行测试。
在任一时刻,状态结构中的所有线段之间具有一个定义明确的次序,因此可以使用一棵平衡二分查找树来实现状态结构。
2.2.双向链接边表
一般的地图,要将整个平面划分为多个子区域。我们将用双向链接边表(doubly-connected edge list)表示子区域划分。
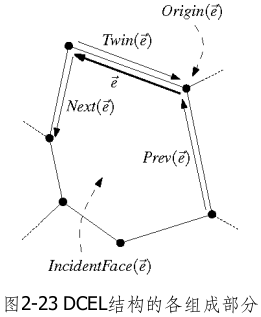
将每条边的两边分别视为一条半边(half-edge),它们互为孪生兄弟(twin)。这样任何一条半边都有唯一的前驱半边和后继半边。则每条半边就只隶属于唯一一张面的边界。
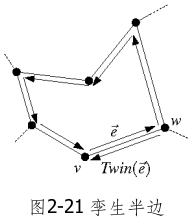
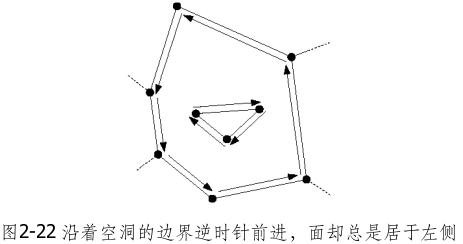
在为每一条半边指定后继半边时,总是依照同一原则:后继半边的方向,应该能够沿逆时针方向遍历其对应的面。这样也同时为各条半边导出了一个方向:如果观察这沿着这一方向前行,每条半边所参与围成的那张面,总是位于其左侧。(小车将靠右行驶)
若是空洞,就按顺时针方向来遍历其边界。这样,无论是哪张面,对于构成其边界的那些半边来说,该面总是位于其左侧。
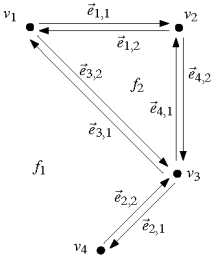
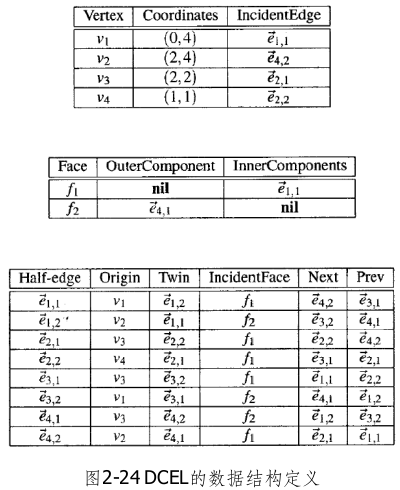
双向链接边表由三组记录构成,分别对应于顶点、面、半边。
- v顶点相关:顶点的坐标Coordinates(v)、指向以该顶点为起点的某条半边的指针IncidentEdge(v)
- f面相关:指向该面外边界(outer boundary)上的任意一条半边的指针OuterComponent(f)、指向该面的各个空洞的边界上的某一条半边的指针列表InnerComponents(f)
- e半边相关:指向该半边起点的指针Origin(e)、指向其孪生半边的指针Twin(e)、指向其参与围成的那张面的指针IncidentFace(e)、指向其沿着IncidentFace(e)边界的前驱边Prev(e)与后继边Next(e)
在双向链接边表的某些实现中,可能还会要求子区域划分的顶点和边所对应的图必须是连通的。为此,只需引入一些虚边(dummy edge)。保证连通性至少有两个好处:首先,只需一趟图遍历,就可以访问到所有的半边;另外,既然连通图对应的子区域划分绝不会出现空洞,InnerComponents()列表也就不必存在了。
3.多边形三角剖分:画廊看守
3.1.看守与三角剖分
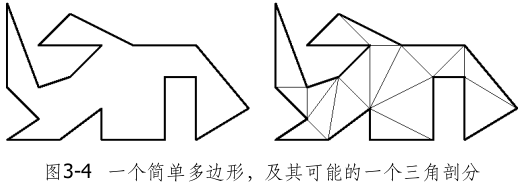 定理 3.1:任何简单多边形都存在(至少)一个三角剖分;若其顶点数目为n,则它的每个三角剖分都恰好包含n-2个三角形。
定理 3.1:任何简单多边形都存在(至少)一个三角剖分;若其顶点数目为n,则它的每个三角剖分都恰好包含n-2个三角形。
定理 3.2(艺术画廊定理):包含n个顶点的任何简单多边形,只需(放置在适当位置的)$\lfloor \frac n3 \rfloor$台摄像机就能保证:其中任何一点都可见于至少一台摄像机。
定理 3.3:任给一个包含n个顶点的简单多边形P。总可以在O(nlogn)时间内,在P中确定$\lfloor \frac n3 \rfloor$台摄像机的位置,使得P中的任何一点都可见于其中的至少一台摄像机。
3.2.多边形的单调块划分
如果对任何一条垂直于l的直线l’,l’与该多边形的交都是连通的,那么这个简单多边形关于直线l单调(monotone with respect to a line l)。
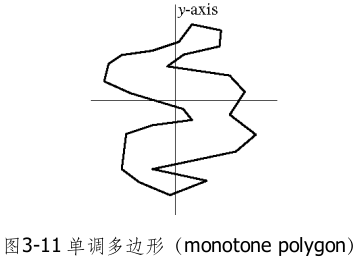
例如y-单调多边形(y monotone polygon)的特性:在沿着多边形的左(右)边界,从最高顶点走向最低顶点的过程中,我们始终都是朝下方(或者水平)运动,而绝不会向上。
我们对多边形P进行三角剖分的策略是:首先将P划分成若干个y-单调块,然后再对每块分别进行三角剖分。
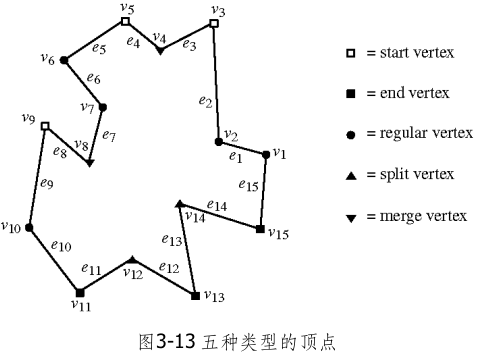
P的顶点可划分为五类:
- 起始顶点(start vertex):与它相邻的两个顶点的高度都比它低,而且在顶点v处的内角小于π
- 分裂顶点(split vertex):该内角大于π
- 终止顶点(end vertex):与它相邻的两个顶点的高度都比它高,而且在v处的内角小于π
- 汇合顶点(merge vertex):该内角大于π
- 普通顶点(regular vertex):这四类拐点以外的所有顶点。也就是说,在每个普通顶点的两个相邻顶点中,必然有一个比它高,而另一个则比它低。
引理 3.4:一个多边形若既不含分裂顶点,也不含汇合顶点,则必然是y-单调的。
引理 3.5:通过引入一系列互不相交的对角线,算法MAKE MONOTONE能够将P划分为多个单调子多边形。
定理 3.6:使用O(n)的存储空间,可以在O(nlogn)时间内将包含n个顶点的任何简单多边形分解为多个y-单调的子块。
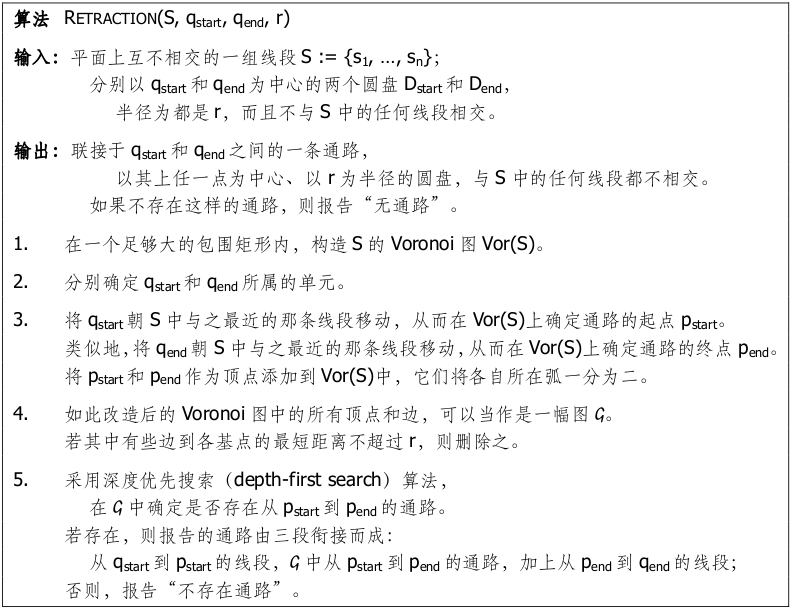
7.Voronoi图:邮局问题
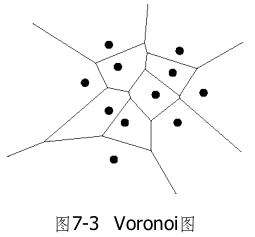
维诺图(Voronoi图)是基于给定一组基点的空间分割。它将平面分割成一组多边形,每个多边形包围一个基点,该多边形中的每个点距离最近的基点比其他基点更近。每条边都是某对基点连线的垂直平分线的一段。
7.3.线段集Voronoi图
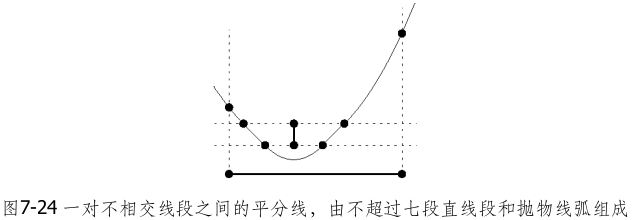
点以外的其它物体也可定义Voronoi图。此时,平面上一点到物体的距离,定义为该点到物体上各点的最近距离。两点之间的平分线必是一条直线,但不相交线段之间的平分线的形状却要更为复杂。它最多可分为七段,每一段或是直线段,或是抛物线弧(parabolic arc)。若到一条线段的最短距离在其某个端点达到,而到另一条线段的最短距离却是在其内部某点达到,则对应于一条抛物线弧。其它的情况下,都对应于一条直线段。
线段集Voronoi图的一个应用实例即运动规划(motion planning,参见第13章)。假设给定可表示为n条线段的一组障碍物和一个机器人R,该机器人可以近似为一个包围圆D(enclosing disk),可以朝任意方向自由移动。需要在两个位置之间,为该机器人找出一条无冲突的运动路径(collision-free motion),或者判定无路可通。
运动规划的技巧之一,就是所谓的收缩(retraction)。其思路是:Voronoi图中的各条弧给出了介于各线段基点之间的中间线,沿这些弧行进遇到障碍的可能性最小,因此其对应的路线也是最好的无冲突运动路径。下图给出了一个矩形区域内的一组线段,以及与它们相对应的Voronoi图。
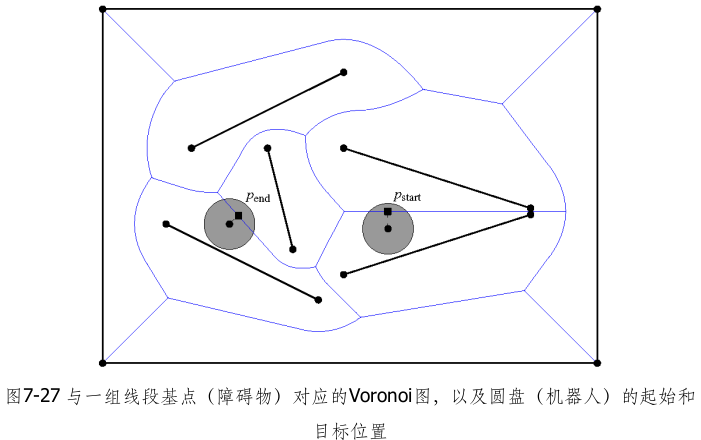
采用以下算法,即可在由任意一组线段表示的障碍物之间,规划出一条无冲突的运动路径。