第5讲 相机与图像
5.1 相机模型
5.1.1 针孔相机模型
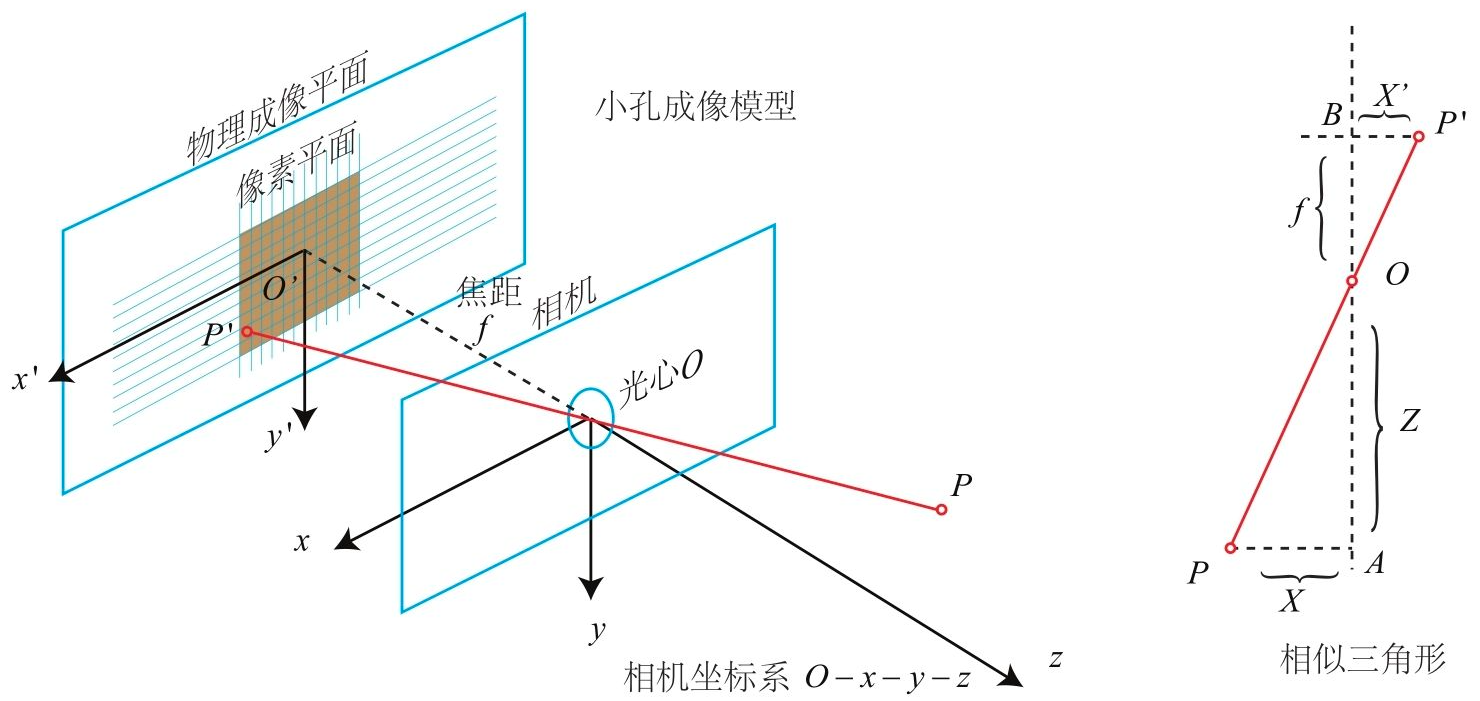 设O-x-y-z为相机坐标系,习惯上我们让z轴指向相机前方,x向右,y向下。O为摄像机的光心,也是针孔模型中的针孔。现实世界的空间点P,经过小孔O投影之后,落在物理成像平面O′-x′-y′上,成像点为P′。设P的坐标为$[X,Y,Z]^T$ ,P′为$[X′,Y′,Z′]^T$ ,并且设物理成像平面到小孔的距离为f(焦距)。根据三角形相似关系,有(1)。其中负号表示成的像是倒立的。为了简化模型,我们可以把成像平面对称到相机前方,把公式中的负号去掉,整理得(2)。
设O-x-y-z为相机坐标系,习惯上我们让z轴指向相机前方,x向右,y向下。O为摄像机的光心,也是针孔模型中的针孔。现实世界的空间点P,经过小孔O投影之后,落在物理成像平面O′-x′-y′上,成像点为P′。设P的坐标为$[X,Y,Z]^T$ ,P′为$[X′,Y′,Z′]^T$ ,并且设物理成像平面到小孔的距离为f(焦距)。根据三角形相似关系,有(1)。其中负号表示成的像是倒立的。为了简化模型,我们可以把成像平面对称到相机前方,把公式中的负号去掉,整理得(2)。
$ \frac Zf=-\frac X{X’}=-\frac Y{Y’} \tag{1} $
$ X’=f\frac XZ,\ \ Y’=f\frac YZ \tag{2} $
在相机中,我们最终获得的是一个个的像素,这需要在成像平面上对像进行采样和量化。假设在物理成像平面上固定着一个像素平面o-u-v 。我们在像素平面得到了P′的像素坐标$[u,v]^T$。
像素坐标系通常的定义方式是:原点o′位于图像的左上角,u轴向右与x轴平行,v轴向下与y轴平行。像素坐标系与成像平面之间,相差了一个缩放和一个原点的平移。我们设像素坐标在u轴上缩放了$\alpha$倍,在v上缩放了$\beta$倍。同时,原点平移了$[cx ,cy]^T$。那么,P′的坐标与像素坐标$[u,v ]^T$的关系为(3)。结合上式,得(4)。其中,f的单位为米,$\alpha,\beta$的单位为像素/米,所以fx,fy的单位为像素。
$ u=\alpha X’+c_x,\ \ v=\beta Y’+c_y \tag{3} $
$ u=f_x\frac XZ+c_x,\ \ v=f_y\frac YZ+c_y \tag{4} $
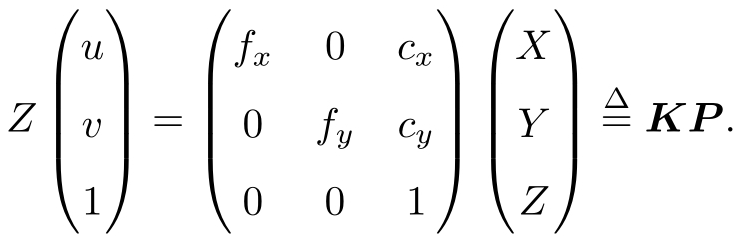
写成矩阵形式,并整理得下式,我们把中间的量组成的矩阵称为相机的内参数矩阵(Camera Intrinsics)。
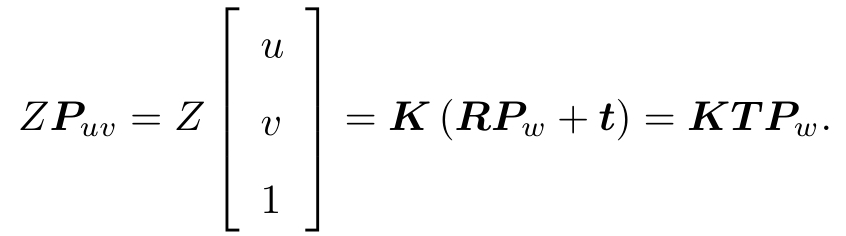
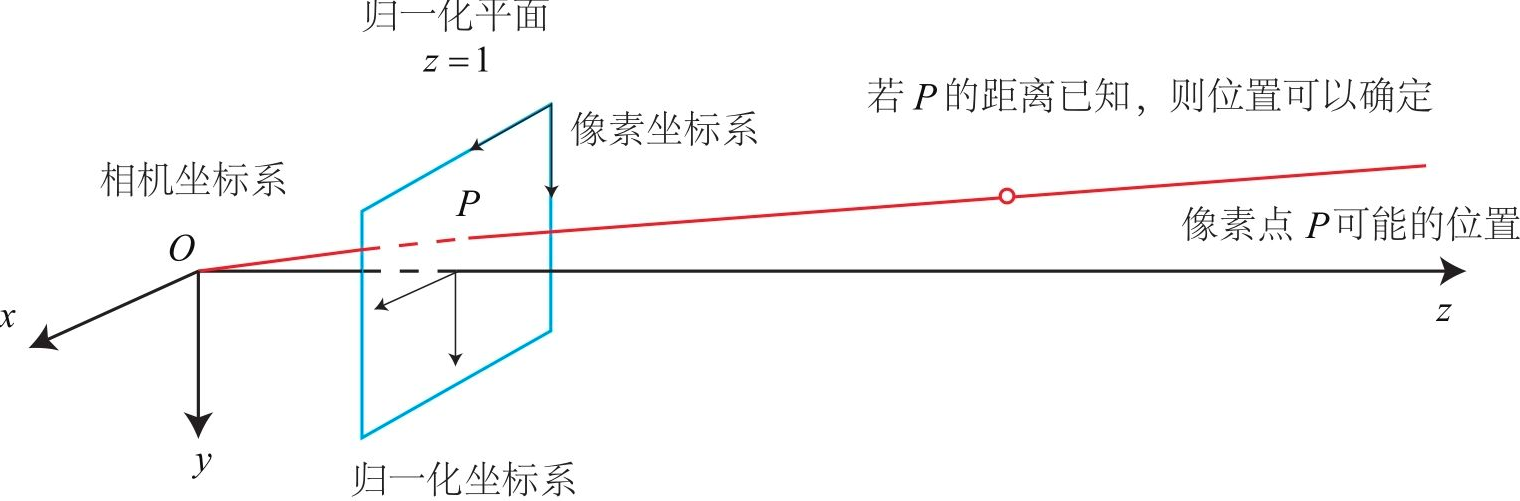
前面使用的是P在相机坐标系下的坐标。由于相机在运动,所以P的相机坐标应该是它的世界坐标(记为Pw),即根据相机的当前位姿变换到相机坐标系下的结果。相机的位姿由它的旋转矩阵R和平移向量t来描述。那么有下式,其中,相机的位姿R,t又称为相机的外参数(Camera Extrinsics)。相比于不变的内参,外参会随着相机运动发生改变,同时也是SLAM中待估计的目标,代表着机器人的轨迹。
5.1.2 畸变
由透镜形状引起的畸变称为径向畸变,分为桶形畸变和枕形畸变。
在相机的组装过程中由于不能使透镜和成像面严格平行会引入切向畸变。
5.1.3 双目相机模型
 双目相机*的原理是:通过同步采集左右相机的图像,计算图像间视差,来估计每一个像素的深度。双目之间的距离称为基线(Baseline,记作b),考虑一个空间点P ,它在左眼相机和右眼相机各成一像,记作$P_L,P_R$。理想情况下,由于左右相机只在x轴上有位移,因此P的像也只在x轴(对应图像的u轴)上有差异。记它的左侧坐标为$u_L$,右侧坐标为$u_R$。那么,其几何关系如上图右侧所示。根据$\Delta PP_LP_R$和$\Delta PO_LO_R$的相似关系,有(5),整理得(6)。
双目相机*的原理是:通过同步采集左右相机的图像,计算图像间视差,来估计每一个像素的深度。双目之间的距离称为基线(Baseline,记作b),考虑一个空间点P ,它在左眼相机和右眼相机各成一像,记作$P_L,P_R$。理想情况下,由于左右相机只在x轴上有位移,因此P的像也只在x轴(对应图像的u轴)上有差异。记它的左侧坐标为$u_L$,右侧坐标为$u_R$。那么,其几何关系如上图右侧所示。根据$\Delta PP_LP_R$和$\Delta PO_LO_R$的相似关系,有(5),整理得(6)。
$ \frac{z-f}z=\frac{b-u_L+u_R}b \tag{5} $
$ z=\frac{fb}d,\ \ d=u_L-u_R \tag{6} $
这里,d为左右图的横坐标之差,称为视差(Disparity)。根据视差,我们可以估计一个像素与相机之间的距离。视差与距离成反比:视差越大,距离越近。虽然由视差计算深度的公式很简洁,但视差d 本身的计算却比较困难。
5.1.4 RGB-D相机模型
目前的RGB-D相机按原理可分为两大类:
1.通过红外结构光测量像素距离。相机根据返回的结构光图案,计算物体与自身之间的距离。
2.通过飞行时间法测量像素距离。相机向目标发射脉冲光,然后根据发送到返回之间的光束飞行时间,确定物体与自身之间的距离。
5.2 图像
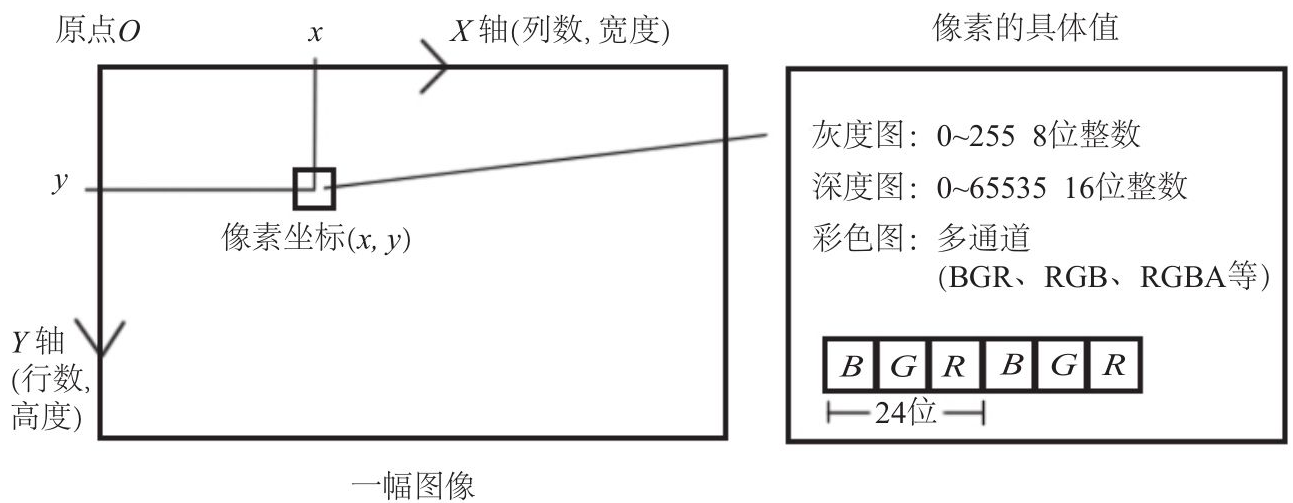 我们平时说的图像的宽度或列数,对应着X轴;而图像的高度或行数,则对应着它的Y轴。根据这种定义方式,如果我们讨论一个位于x,y处的像素,那么它在程序中的访问方式应该是
我们平时说的图像的宽度或列数,对应着X轴;而图像的高度或行数,则对应着它的Y轴。根据这种定义方式,如果我们讨论一个位于x,y处的像素,那么它在程序中的访问方式应该是unsigned char pixel = image[y][x];