ORB特征由关键点和描述子两部分组成,关键点称为Oriented FAST,由FAST角点改进而来;描述子称为BRIEF(Binary Robust Independent Elementary Feature。下面先讲FAST,再介绍ORB。
FAST
Fast是一种角点,主要检测局部像素灰度变化明显的地方,以速度快著称。步骤如下:
- 在图像中选取像素p,假设它的亮度为$I_p$
- 设置一个阈值T(如$I_p$的20%)
- 以像素p为中心,选取半径为3的圆上的16个像素点
- 如果选取的圆上有连续N个点亮度大于$I_p$+T或小于$I_p$-T,则像素p可被认为是特征点(N通常取9、11、12,被称为FAST-9、FAST-11、FAST-12)
- 循环以上4步,对每个像素执行相同操作
为了更高效,可添加预测试操作,以快速排除绝大多数不是角点的像素。即直接检测领域圆上的第1、5、9、13个像素的亮度,只有这4个有3个亮度大于$I_p$+T或小于$I_p$-T,才可能是一个角点。
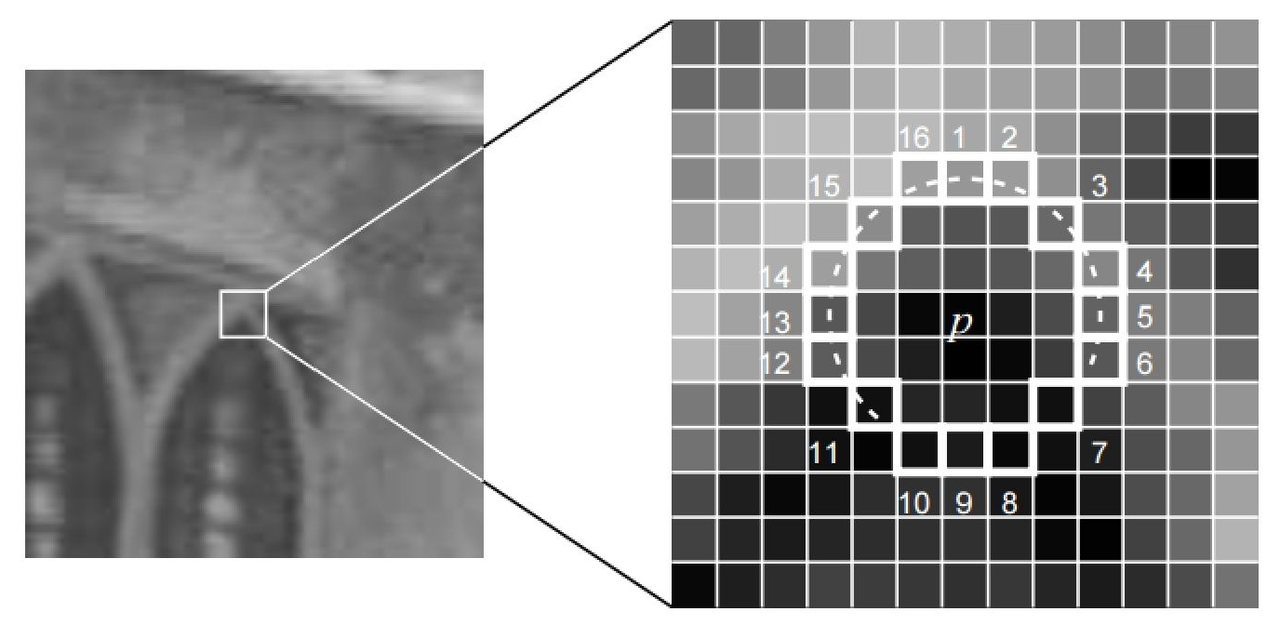
原始的FAST角点容易扎堆,所以在第一遍检测之后,还需要用非极大值抑制,在一定区域内仅保留最大点(ORB-SLAM中使用四叉树分裂得到更均匀的ORB分布)。
FAST的问题
- 数量:FAST角点数量很大且不确定
- 方向:不具有方向信息
- 尺度:存在尺度问题(由于固定取半径为3的圆,远看像角点的地方,接近看可能就不是角点)
ORB
针对FAST存在的问题作出改进:
- 数量:指定要提取的角点数N,对FAST角点分别计算Harris相应值,选取前N个最大相应值的角点
- 方向:由灰度质心法(Intensity Centroid)计算旋转角,再根据旋转角旋转到统一方向
- 尺度:构建图像金字塔,并在金字塔的每一层上检测角点实现尺度不变性(在ORB-SLAM中)
Oriented FAST
灰度质心法:以图像块几何中心到灰度质心的向量作为特征方向
Steer BRIEF
BRIEF是一种二进制描述子,其中的0和1编码了关键点附近两个像素p和q的大小关系。p和q按照某种分布随机选取,在ORB-SLAM2源码中,写死了一种pattern,是通过神经网络的训练,发现的一种效果很好的点对pattern。
原始的BRIEF不具有旋转不变性,因此在图像发生旋转时容易丢失,而ORB在Oriented FAST中计算了关键点的方向,所以可以利用该方向计算旋转之后的Steer BREIED使其具有旋转不变性。即将图像块根据计算出的方向进行旋转,使得所有特征拥有统一的方向,在此基础上描述就避免了旋转带来的差异。
参考
- 《slam十四讲》
- 《ORB : an efficient alternative to SIFT or SURF》